Robotics/Mechanical engineer with 7+ years of experience in bio-robotic design, development, and evaluation. Published
in peer-reviewed journals after leading thousands of experiments. Skilled in deploying reinforcement learning to enhance
robotic adaptability, with strong technical expertise in debugging, software, and mechanical design. Proven team leader with
excellent communication skills.
Education
PhD in Mechanical Engineering
Drexel University, Philadelphia, PA
Anticipated Graduation: December 2024
Master of Science in Mechanical Engineering
Drexel University, Philadelphia, PA
Graduated: September 2024
Current Research
This study employs Reinforcement Learning (RL) to develop velocity controllers for a sophisticated fish-like robot equipped with multiple fins—including a caudal fin, two pectoral fins, and two median fins—and segmented body parts, such as the body and peduncle.
The research focuses on evaluating the performance of RL-based controllers in enhancing gait efficiency and minimizing the Cost of Transport (CoT). By conducting comparative analyses both in simulation environments and through real-world experiments on the physical robot,
the study assesses the effectiveness of RL in optimizing locomotion efficiency and reducing operational costs. This approach aims to advance the development of more efficient and agile underwater robots through intelligent control strategies.
Comparing the forward velocities from the RL agent in simulation and on the robot (with low and high cost of transport producing strategies).
Publications and Academic Experience
Using reinforcement learning to develop a novel gait for a bio-robotic California sea lion
In this study, I applied reinforcement learning (RL) to develop a novel swimming gait for a bio-robotic model inspired by the California sea lion’s foreflippers. By integrating a computational representation of the robot, RL was able to
optimize the gait for underwater propulsion, surpassing the performance of the sea lion’s natural swimming motion in simulation. When tested on a physical robot, the RL-generated gait matched or exceeded the real-world efficiency of the sea lion’s characteristic movements,
highlighting the potential of combining bio-inspired design with advanced AI to enhance underwater robotics.
Simulation
Bio-robotic Simulated Sea Lion Robot
Learning a New Fore Flipper Propulsive Stroke
Robot
Testing four different strokes on SEAMOUR platform:
1) Biological characteristic stroke
2) 3 different strokes developed with Reinforcement Learning
(Learned Stroke C best performing)
Fish robotics: multifin propulsion and the coupling of fin phase, spacing and compliance
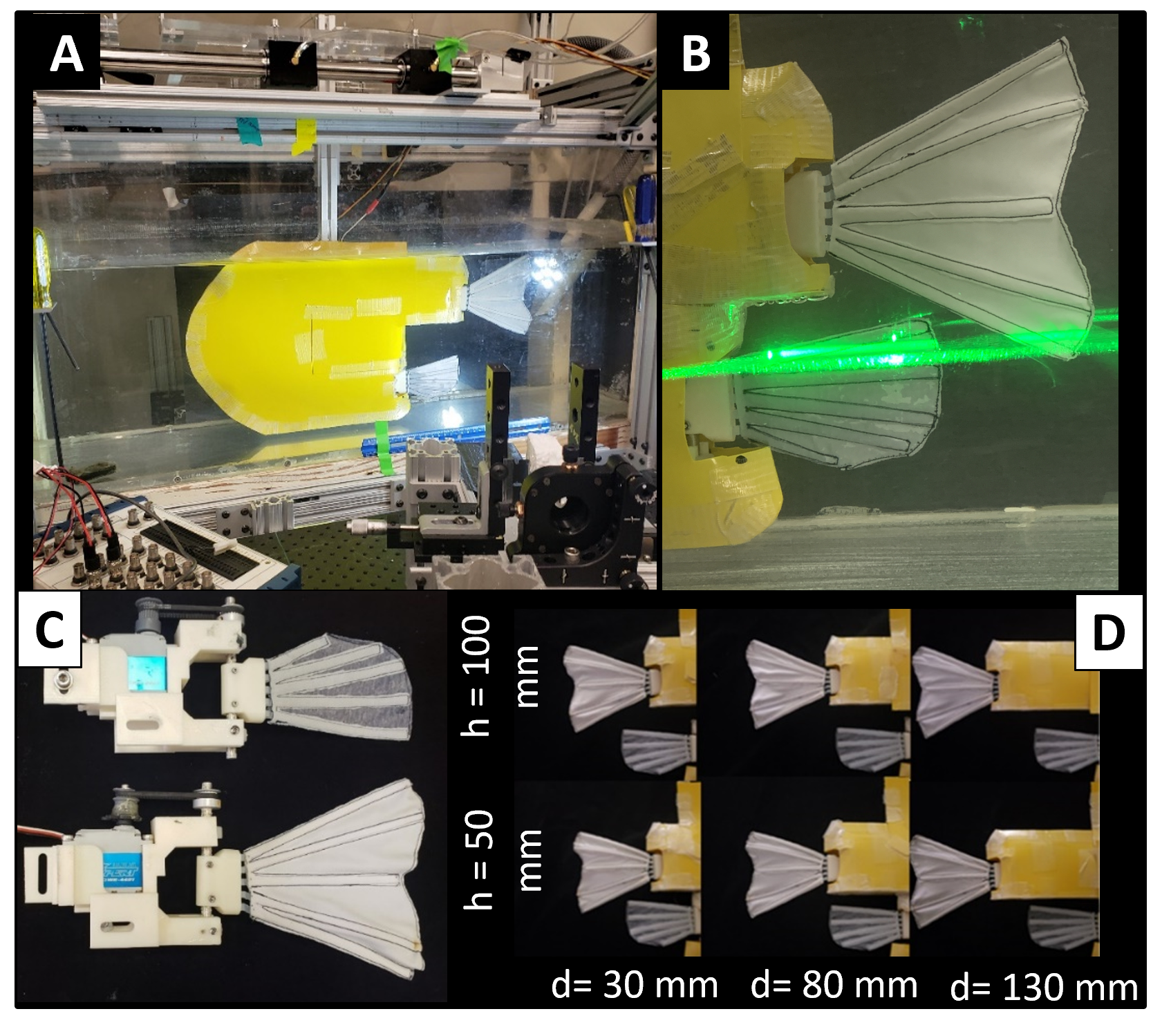
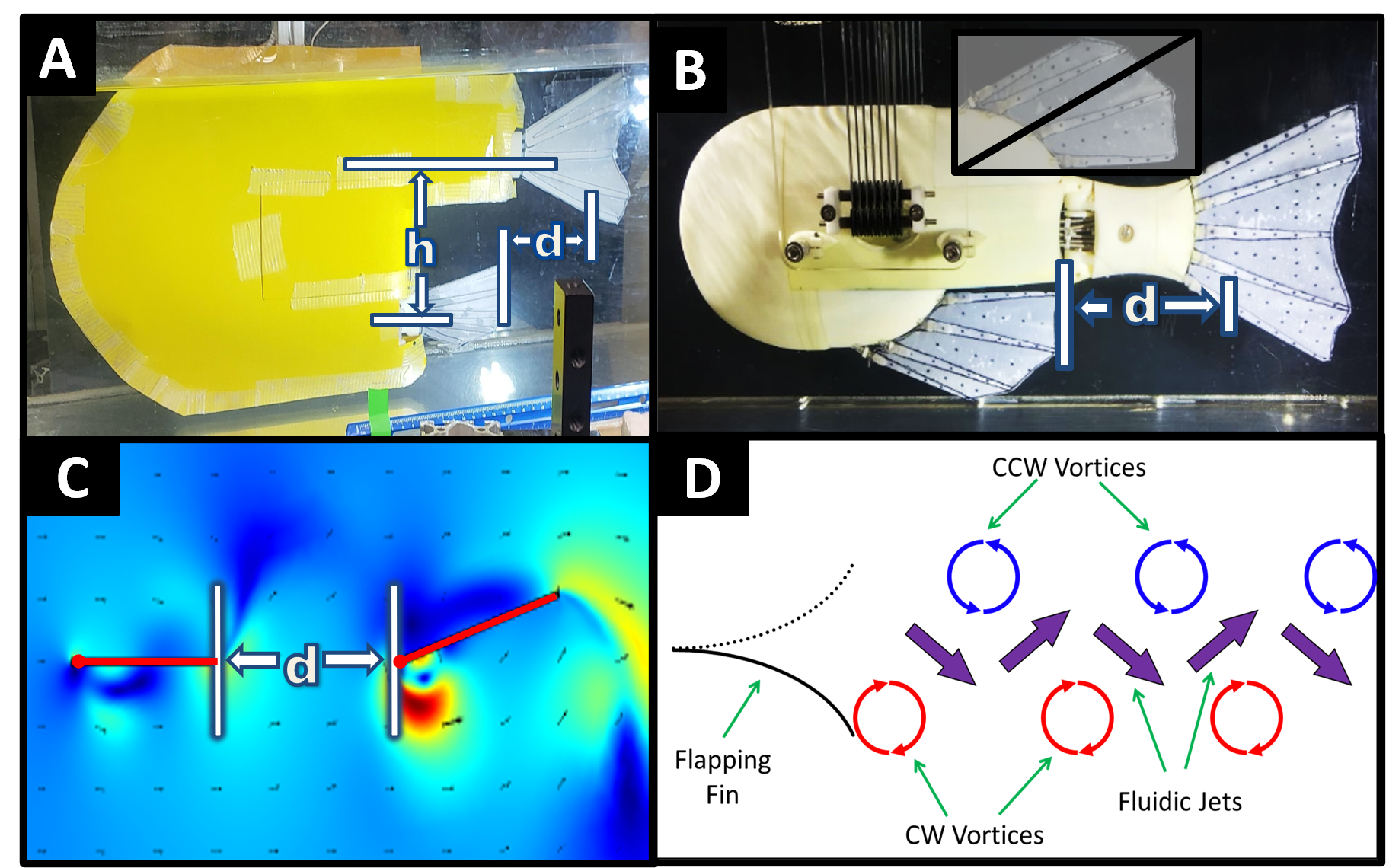
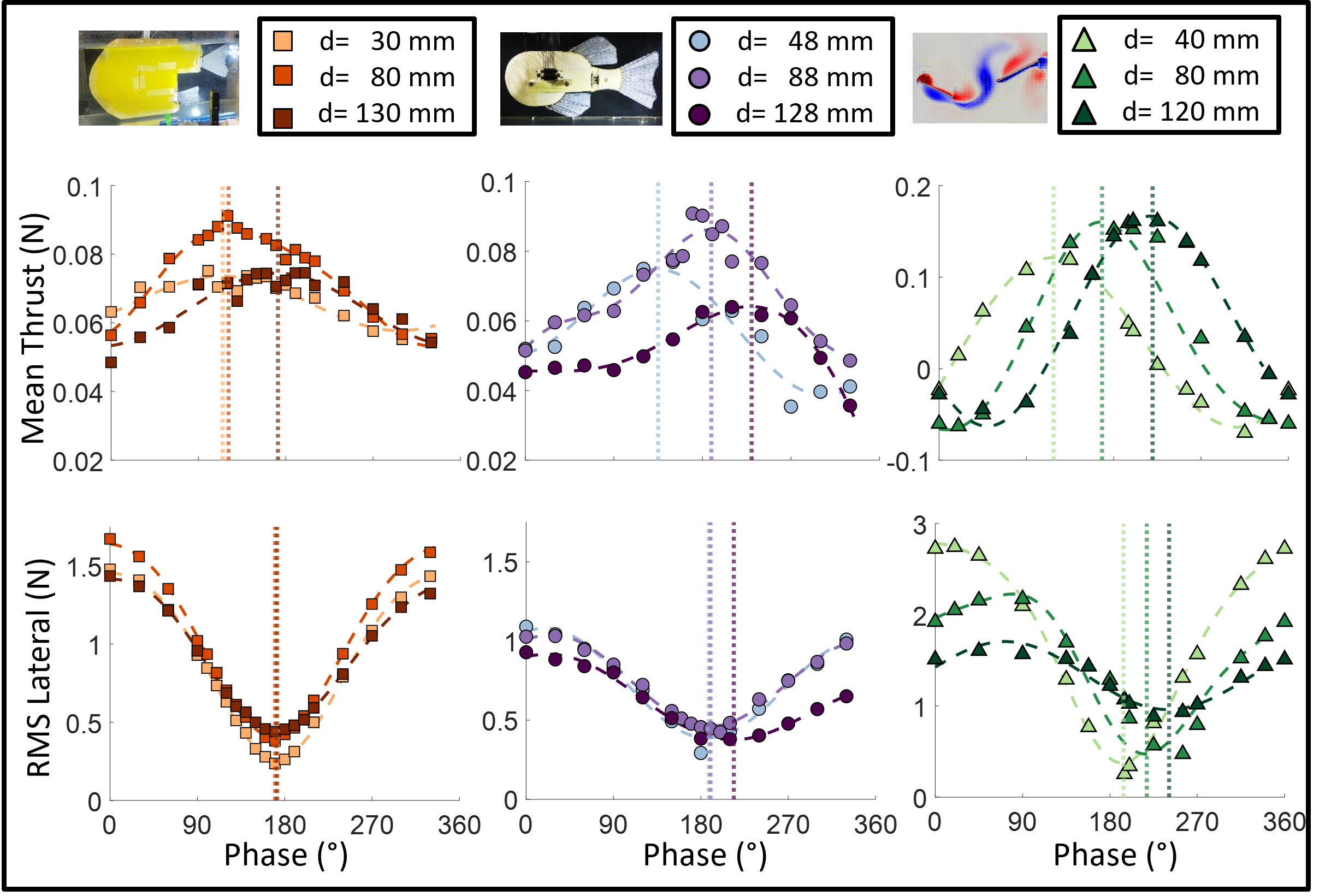
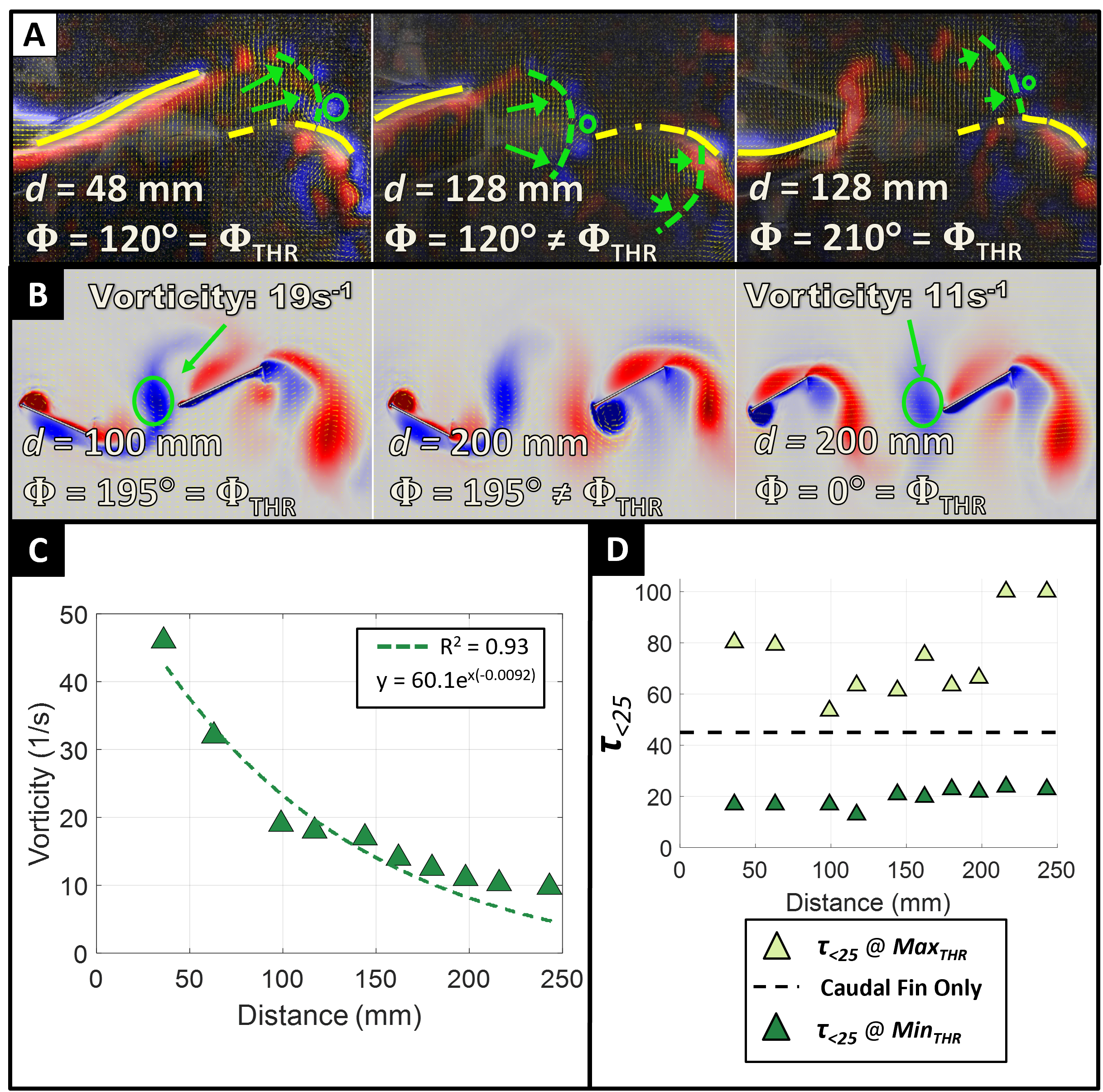
In this study, we explored how the coordination and positioning of fish-like fins affect propulsion in underwater robots. Using two bio-inspired robotic swimmers and computational fluid dynamic simulations, we analyzed how phase difference, fin spacing, and fin compliance influence net thrust and lateral forces. Our results revealed that even minor adjustments to the spacing and coordination of paired fins can significantly enhance or diminish propulsive force, offering valuable insights for multi-finned robot design.
My contributions included designing and running the experiments, constructing one of the robots, performing data analysis, and co-authoring the paper.
Experimental Setup
Experimental systems, both robotic and simulation
Experimental variables and modes of analysis
Experimental Results
How propulsive forces change with horizontal fin distance
How flows and vorticity change with horizontal fin distance
Reinforcement Learning as a Method for Tuning CPG Controllers for Underwater Multi-Fin Propulsion
In this paper, presented at ICRA 2023, I employed reinforcement learning (RL) to optimize central pattern generator (CPG) parameters for a multi-fin underwater robot, overcoming the challenges of nonlinear oscillator behavior. Instead of relying on high-fidelity simulations, which are computationally expensive, we conducted force sweeps in a controlled environment and used this data to create a simplified simulation. This approach enabled the learning of CPG parameters that generated propulsively beneficial kinematics. When applied to the physical robot, the learned parameters produced the expected kinematics and forces, matching simulation results without additional training.
Research Methods and Results for ICRA 2023
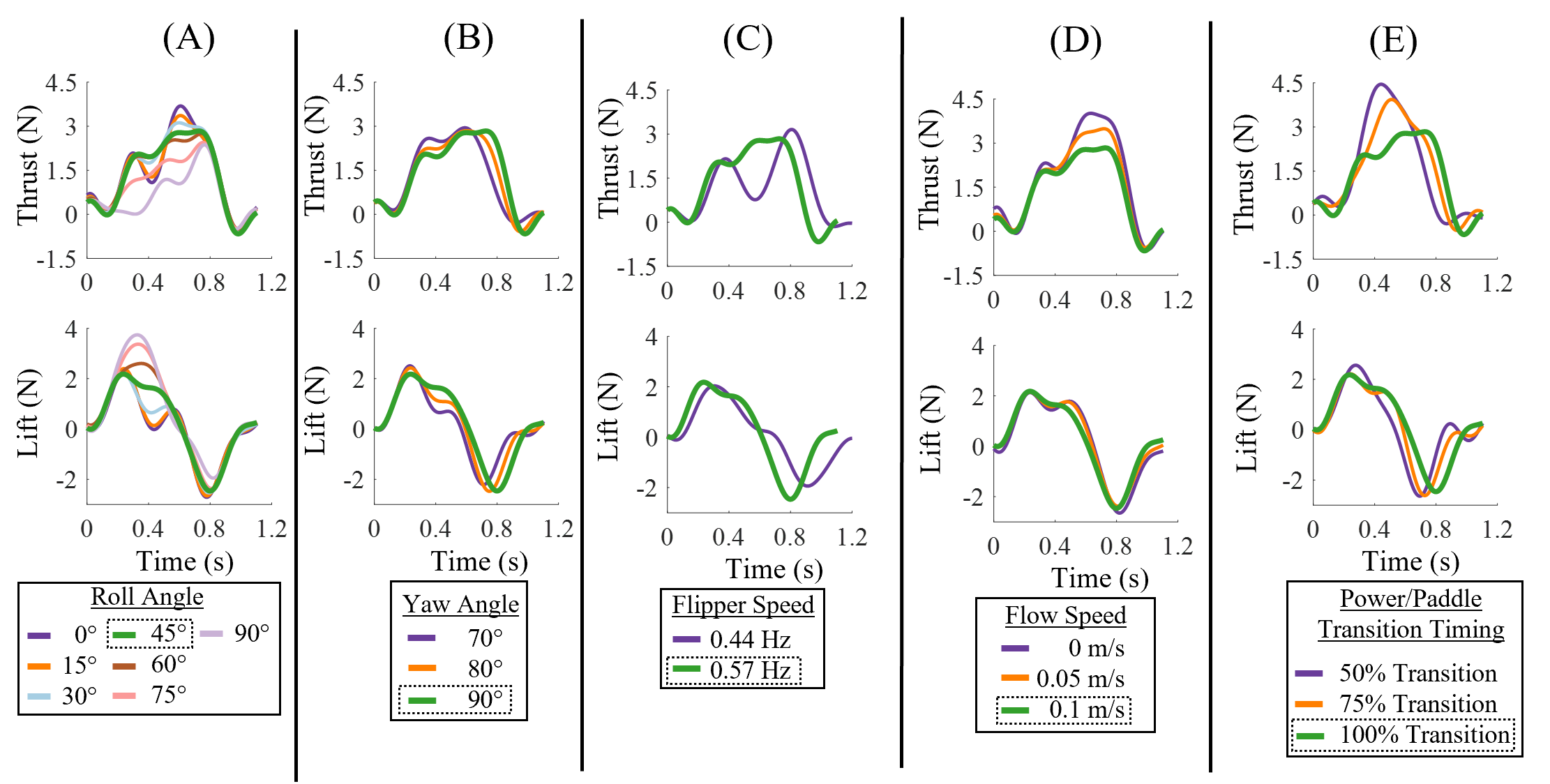
Thrust and Lift Characterization with a Bio-Inspired Robotic Sea Lion Foreflipper: Effects of Kinematic Modifications on the Propulsive Stroke
Soon to be Published
Soon to be published, this paper explores the propulsive mechanisms of the California sea lion's foreflipper, aiming to inform the design of bio-inspired underwater robots. Our research, conducted in a controlled flow tank, examines how modifications in flipper kinematics and flow speed affect thrust and lift generation using a bio-robotic foreflipper model. We uncovered how the power and paddle phases of the stroke contribute to time-dependent and mean forces, offering key insights into the dynamics of sea lion propulsion. This work lays the foundation for more agile and maneuverable underwater robotic designs.
Modeling the fore flipper kinematics during sea lion swimming
Time-dependent propulsive forces from characteristic sea lion fore flipper stroke
Work Experience
Crayola LLC
Process and Product Development Engineer - Easton, PA
July 2016 - August 2017
As a Process and Product Development Engineer, I contributed to Crayola's innovation by developing a patented, cost-effective formulation for Model Magic, and led a cross-functional team to design and produce a new toy. I also oversaw international large-scale production of my own formulations and managed the creation of unique scented marker inks.
Patent:Moldable compositions and methods of using thereof - Patent number: 11084924